 |
||
|
|
||
| |||||||||||||||
|
|
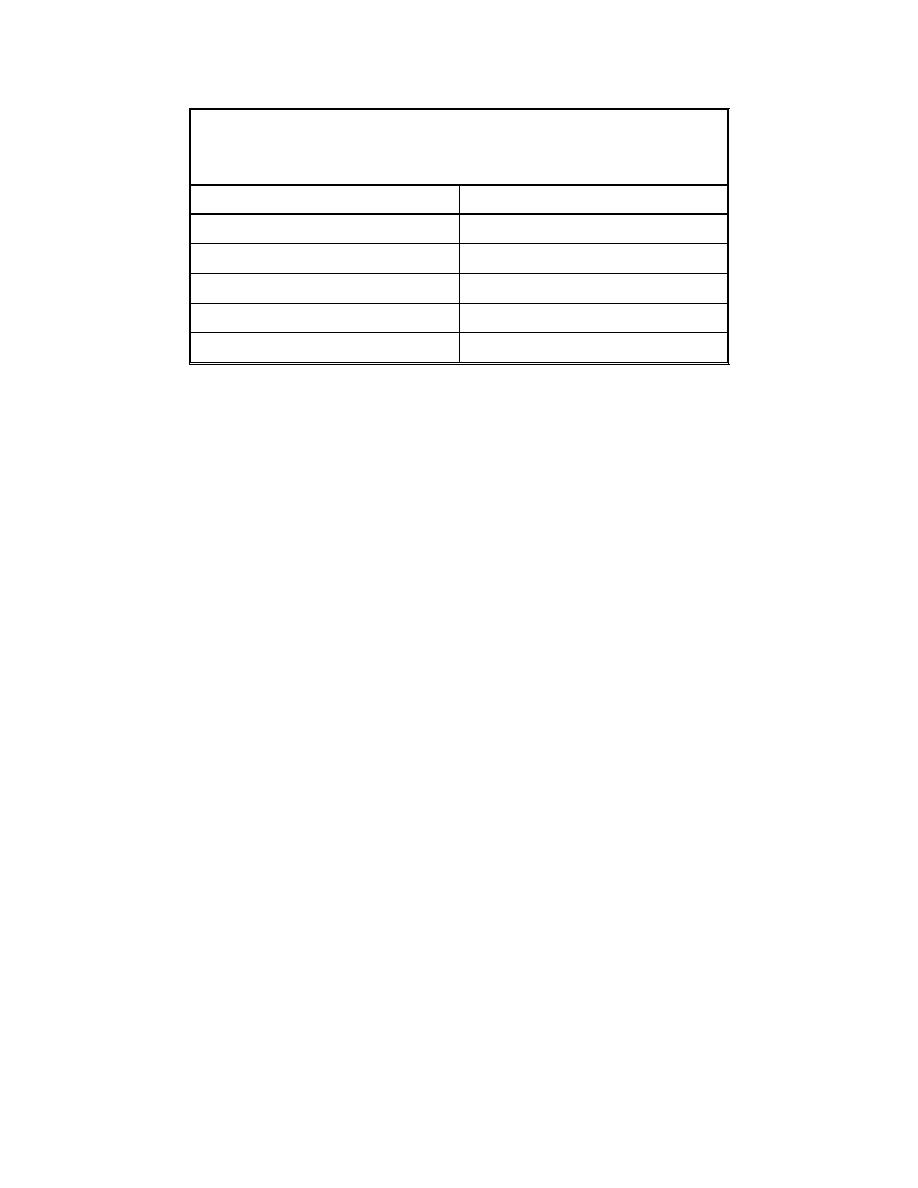 Table 4
Accuracy of Common Positioning Systems (from USACE
EM 1110-2-1003)
Positioning System
Estimated Accuracy, Meters RMS
Range-azimuth
0.5 to 3
LORAN-C (low-frequency)
50 to 2,000
Microwave (high-frequency)
1 to 4
GPS
50 to 100
DGPS
0.1 to 1.0
buoy placement), and the exact dredged material placement location is sub-
ject only to the tug or dredge captain's discretion of buoy offset distance.
Placement offset from the buoy depends on local weather and safety con-
cerns. Specific guidance varies from site to site, but the New England
Division has found success with specifying placement within 25 to 50 m
of buoy location depending on weather/sea conditions. Experience has
shown that this type of placement tends to concentrate material at one
point or in a transect along the direction of travel of the tug and barge.
This factor should be taken into consideration in buoy placement or in
placement specifications for tug operators.
Range-azimuth
Range-azimuth positioning is a traditional surveying technique where a
shore-based station (transit, theodolite, or total station) is used to determine
an angular azimuth to the vessel of interest. This azimuth is then coupled
with an electronically determined distance obtained from an electronic
frared EDM) at the same location. Range-azimuth positioning is very ac-
curate, but because of the shore station requirement, it is applicable only
at sites where dredged material placement is relatively close to shore
(USACE EM 1110-2-1003). Range-azimuth positioning has been used by
the Seattle District for several capping projects, e.g., the Duwamish Water
project in 1984 (Truitt 1986b) and the Denny Way project (Sumeri 1989).
Electronic positioning systems (EPS)
Generally, the higher the frequency is of EPS, the more accurate the po-
sitioning. LORAN-C is a low-frequency, time-differencing hyperbolic
phase/pulse system that triangulates vessel position based on relative dis-
tances from shore-based stations. Because LORAN-C is a low-frequency
system, it has a low accuracy and is the least desirable for vessel position-
ing. For hydrographic surveys, LORAN-C is only suitable for Class 3
surveys (reconnaissance level), and absolute accuracy without onsite cali-
43
Chapter 5 Equipment and Placement Techniques
|
|
Privacy Statement - Press Release - Copyright Information. - Contact Us - Support Integrated Publishing |
